作業者がより安全で、より簡単に
短時間での工事を可能にする
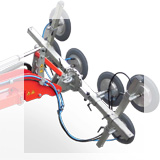
ガラス&パネル取付用マニピュレーター
製品ラインアップ
特徴
- 人手不足に貢献
- 重筋作業からの解放
- 安全性の向上※1
- 工期短縮
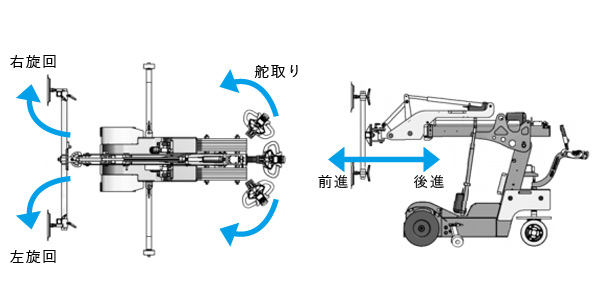
- 従来工法と違い自走が可能
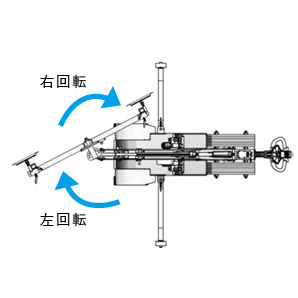
- 荷物を持ち上げた状態での
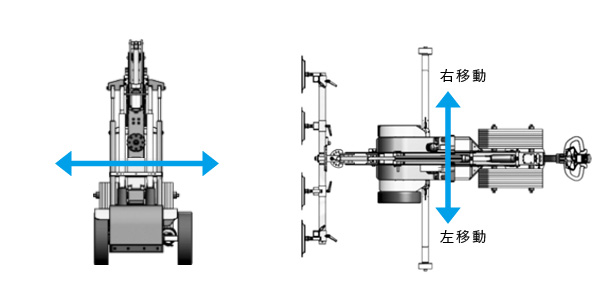
方向転換が可能 - アーム先端をスイングさせる事で
狭路も走行可能 - 玉掛けを含む法的な
資格・
特別教育の必要がない※2
- 主な安全機能
- 当社が定めるオペレータ教育の修了を使用上の条件としております。
- 将来は製造現場における当社のバランサ(助力装置)の実績と技術力を活かしてあらゆる作業に対応したアタッチメントの制作を予定しております。
安全機能
-

-
停止ボタン装備
停止ボタンを押すと操作信号が遮断され、走行と吸着を除く各動作は停止します。
※ ISOなどの非常停止の規格に完全に準拠したものではありません。
-

-
吸着オフ誤操作防止
吸着オフ操作は両手で行う必要があります。
これにより、意図しない吸着オフ操作の心配がありません。
-

-
壁挟まれ防止
後進時に誤って操作者が壁と本機に挟まれてしまった場合、 走行ハンドル正面の検出スイッチが入り、後進操作が前進操作に
切替わります。(挟まれたらすぐに前進して操作者を解放します。)
-

-
過負荷検出
過負荷を検出し、過大な負荷モーメントによる前方への転倒を
防止します。
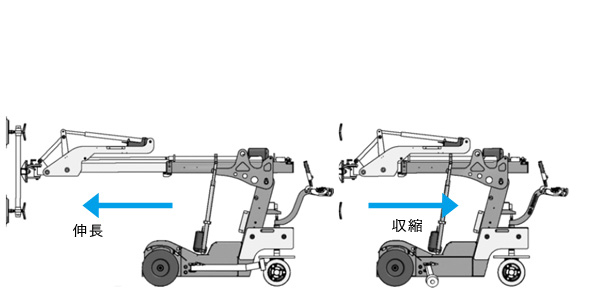
また、過負荷状態が解除されるまで「アームの収縮」と「車体の横行」
以外の操作が出来なくなります。
-

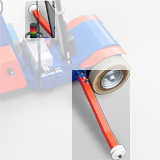
-
吸着状態表示
吸着オン操作後に吸着システムの真空度が設定値に到達したことを
お知らせします。
真空度が設定値に到達してからアームを操作して下さい。
-
-
側面サポート車輪
本機に過度な遠心力や横向きの力が加わる場合に横転を防止します。
なお、側面サポートは折りたたんで収納することができます。
-
-
独立2系統吸着回路
吸着パッドの半数ずつで異なる吸着回路となっています。
万一ワーク吸着中に片方の回路が動作不良になっても、
吸着状態が保持されます。ただし、吸着能力は半減します。
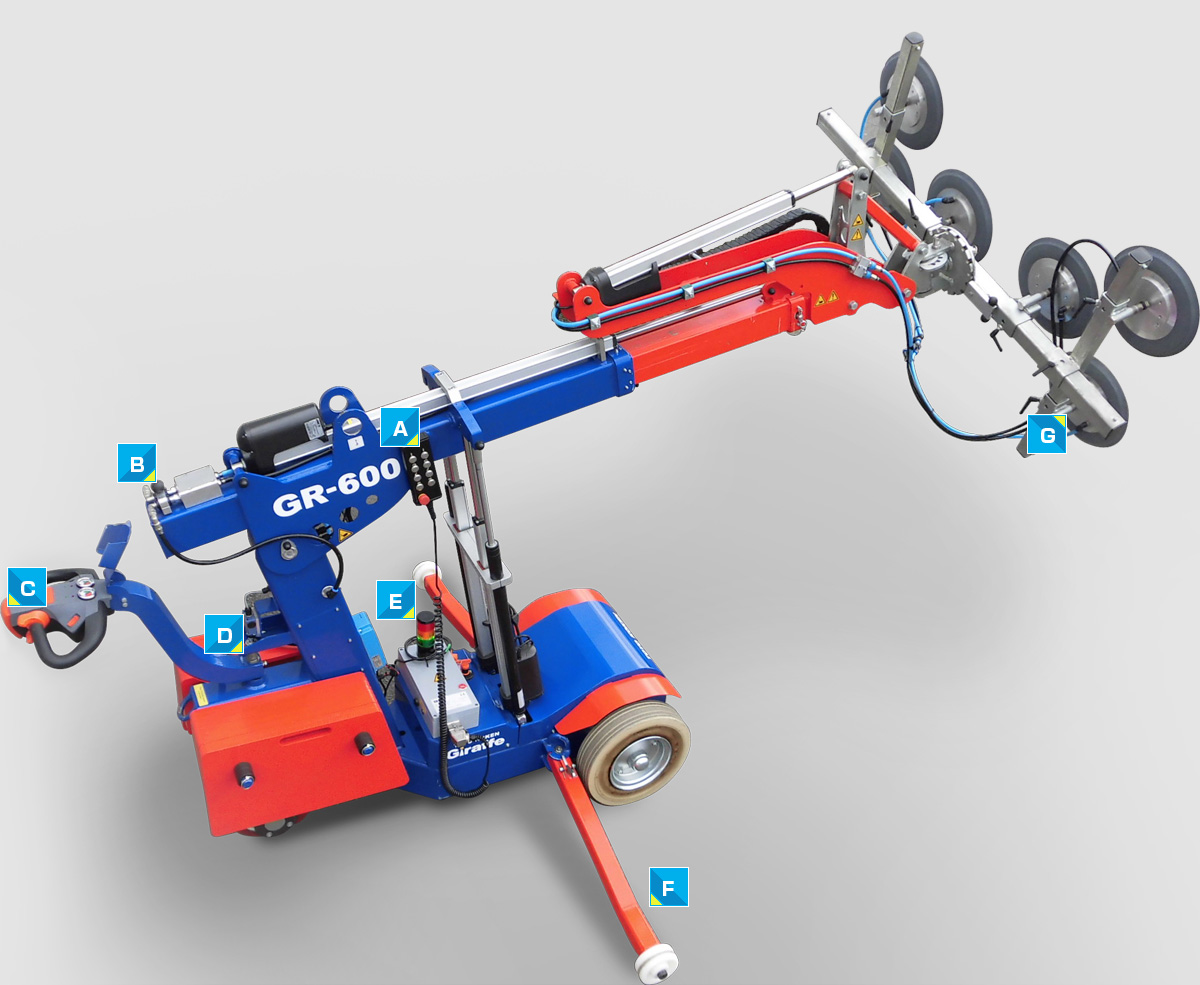
操作機能(コントローラ)
-
走行コントローラ
機能・特徴
- 操舵と走行(前進・後進)操作。
- モード切替え(「速い」 / 「遅い」)。
- 操作レバーで無段階に速度を調整。
- 吸着回路・真空度の状態を表示。
- バッテリ残量を3段階で表示(「30%以上」「30%未満」「なし」)。
安全機能
- 走行操作をしていない時のブレーキ機能。
- 操作者が本機と壁に挟まれたことを検出した場合の、後進操作から前進操作への切替わり。
- 警笛機能。
- GR-280アーム有線コントローラ
- GR-600アーム有線コントローラ